




 2022-05-20
2022-05-20
 点击量:
点击量:

谷歌母公司Alphabet旗下的人工智能实验室DeepMind今天宣布,它已经收购并发布了MuJoCo模拟器,研究人员可以免费使用它作为预编译库。在一篇博客文章中,该实验室表示,它将为2022年发布的代码库做准备,并“继续改进”MuJoCo作为Apache 2.0许可下的开源软件。
最近发表在《美国国家科学院院刊》(Proceedings of the National Academy of Sciences)上的一篇文章探讨了机器人模拟的现状,指出开源工具对推进研究至关重要。两位作者的建议是开发开源模拟平台,并建立由社区策划的模型库,DeepMind声称已经采取了这一步骤。
DeepMind写道:“我们的机器人团队一直在使用MuJoCo作为各种项目的模拟平台……最终,MuJoCo严格遵循统治我们世界的方程式。”“我们致力于开发和维护MuJoCo作为一个免费、开源、社区驱动的项目,具有一流的功能。我们目前正在努力为MuJoCo的完全开源做准备。”
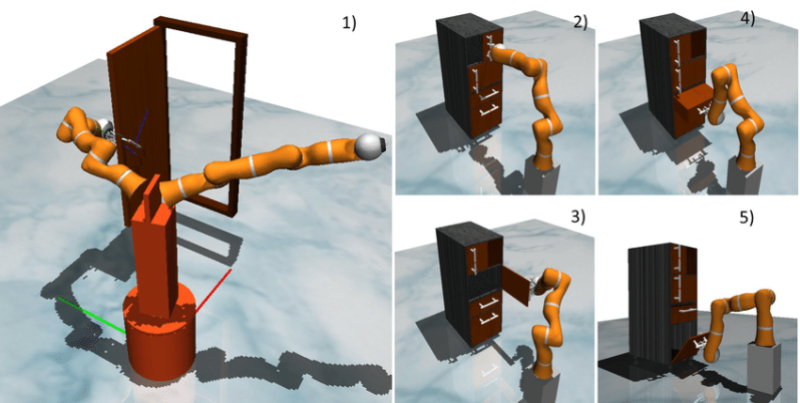
物理模拟
MuJoCo是Multi-Joint Dynamics with Contact的缩写,与Facebook的Habitat、OpenAI的Gym和darpa支持的Gazebo等模拟器一起被广泛应用于机器人领域。MuJoCo最初是由神经科学家、华盛顿大学运动控制实验室主任埃莫·托多罗夫(Emo Todorov)开发的,2015年,初创公司Roboti LLC将MuJoCo作为商业产品推出。
与许多为游戏和电影应用设计的模拟器不同,MuJoCo采用了很少的捷径来优先考虑稳定性而不是准确性。例如,该图书馆考虑了陀螺力,实现了完整的运动方程——描述物理系统的行为的方程,它的运动是时间的函数。MuJoCo还支持人类和动物的肌肉骨骼模型,这意味着施加的力可以正确地分配到关节。
MuJoCo的核心引擎是用编程语言C编写的,这使得它可以很容易地翻译到其他架构。此外,库的场景描述和仿真状态仅存储在两个数据结构中,这两个数据结构构成了重建仿真所需的所有信息,包括中间阶段的结果。
MuJoCo的场景描述格式使用级联默认值——避免多个重复值——并包含现实世界机器人组件的元素,如等式约束、动作捕捉标记、肌腱、驱动器和传感器。我们的长期路线图包括将其标准化为一种开放格式,将其效用扩展到MuJoCo生态系统之外,”DeepMind写道。
当然,没有模拟器是完美的。卡内基梅隆大学的研究人员发表的一篇论文概述了与他们有关的问题,包括:
现实差距:无论多么精确,模拟环境并不总是能充分反映物理现实。
资源成本:模拟的计算开销需要专门的硬件,如显卡,这导致了较高的云成本。
再现性:即使是最好的模拟器也可能包含“不确定性”元素,这使得再现测试不可能。
克服这些障碍是模拟研究的一个重大挑战。事实上,一些专家认为,开发具有100%准确性和复杂性的模拟可能需要与开发机器人本身一样多的解决问题和资源,这就是为什么在可预见的未来,模拟器可能会与真实世界的测试一起使用。
MuJoCo 2.1已经作为解锁的二进制文件发布,可以在项目的原始网站和GitHub上获得,以及更新的文档。DeepMind正在授予许可证,为将于2031年10月18日到期的旧版本MuJoCo(2.0及更早版本)提供解锁激活密钥。
DeepMind收购MuJoCo是在该公司第一个盈利的一年之后。根据上周提交的一份文件,该公司2020年的收入为8.26亿英镑(11.3亿美元),是2019年提交的2.65亿英镑(3.61亿美元)的三倍多。
-
 美国陪审团称迪士尼欠60万美元的动作捕捉版权审判
美国陪审团称迪士尼欠60万美元的动作捕捉版权审判里尔登指责迪士尼在《美女与野兽》中滥用技术。诉讼称,迪士尼使用了“被盗”版本的面部捕捉软件美国加州一个联邦陪审团周四裁定,迪士尼应为其在2017年翻拍真人版《美女与野兽》时使用了另一家公司的动作捕捉技术,
2023-12-25 行业新闻 -
 《杀出重围》主角亚当·詹森的签名配音演员也想做动作捕捉
《杀出重围》主角亚当·詹森的签名配音演员也想做动作捕捉By Ted Litchfield 在《人类革命》中。伊莱亚斯·图菲西斯完成了《人类分裂》的全部表演。不要让网上的软件告诉你不同的说法:5英尺11英寸和6英尺1英寸之间的差距并没有那么大。然而,演员Elias Toufexis最近
2023-11-14 行业新闻 -
 《博德之门3》导演解释为什么每个NPC都是Mo-Capped
《博德之门3》导演解释为什么每个NPC都是Mo-Capped8月25日,动作捕捉导演阿利奥娜·巴拉诺瓦在推特上解释说,如果没有近数百名演员勤奋的动作捕捉表演,拉里安工作室的《龙与地下城》角色扮演游戏《博德之门3》就不会有今天。“对于我们录制的几乎所有对话,我们
2023-10-23 行业新闻