




 2022-05-20
2022-05-20
 点击量:
点击量:
从宇宙飞船到roomba,机器人有潜力成为有价值的助手,并扩展我们的能力。但它仍然很难告诉它们该做什么——我们希望与机器人互动,就像我们在与另一个人互动一样,但使用预先指定的语音/触摸屏命令或设置复杂的传感器往往很笨拙。允许机器人以最小的设置或校准来理解我们的非语言提示,如手势,这是迈向更普遍的人与机器人协作的重要一步。
这个被称为“传导机器人”的系统,旨在通过检测可穿戴肌肉和运动传感器的手势,向这些目标迈进一步。用户可以在二头肌、三头肌和前臂上佩戴小型传感器,通过做出手势来远程控制机器人。目前的系统可以检测到8种预定义的导航手势,无需离线校准或训练数据。新用户只需戴上传感器,开始做手势,就可以远程操控无人机。
通过使用少量可穿戴传感器和即插即用算法,该系统旨在开始减少普通用户与机器人交互的障碍。它建立了一个可扩展的词汇,以便与机器人助手或其他电子设备以更自然的方式交流。我们期待着将这个词汇表扩展到更多的场景,并使用更多的用户和机器人来评估它。
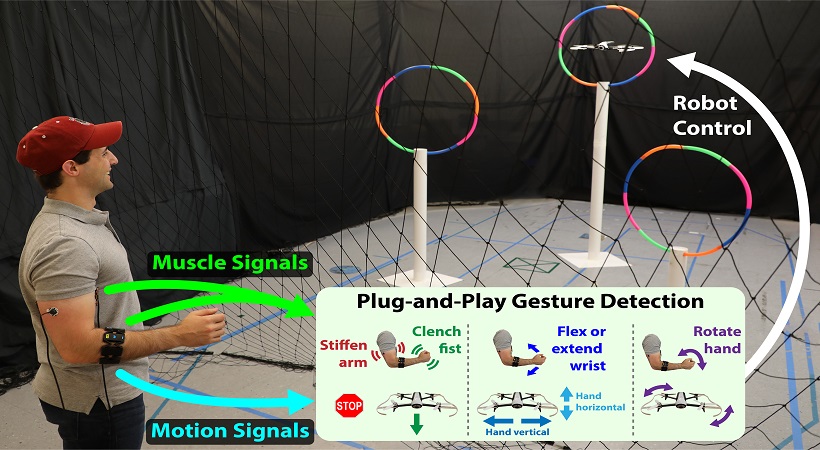
手势词汇使机器人能够使用肌肉和运动传感器进行远程控制
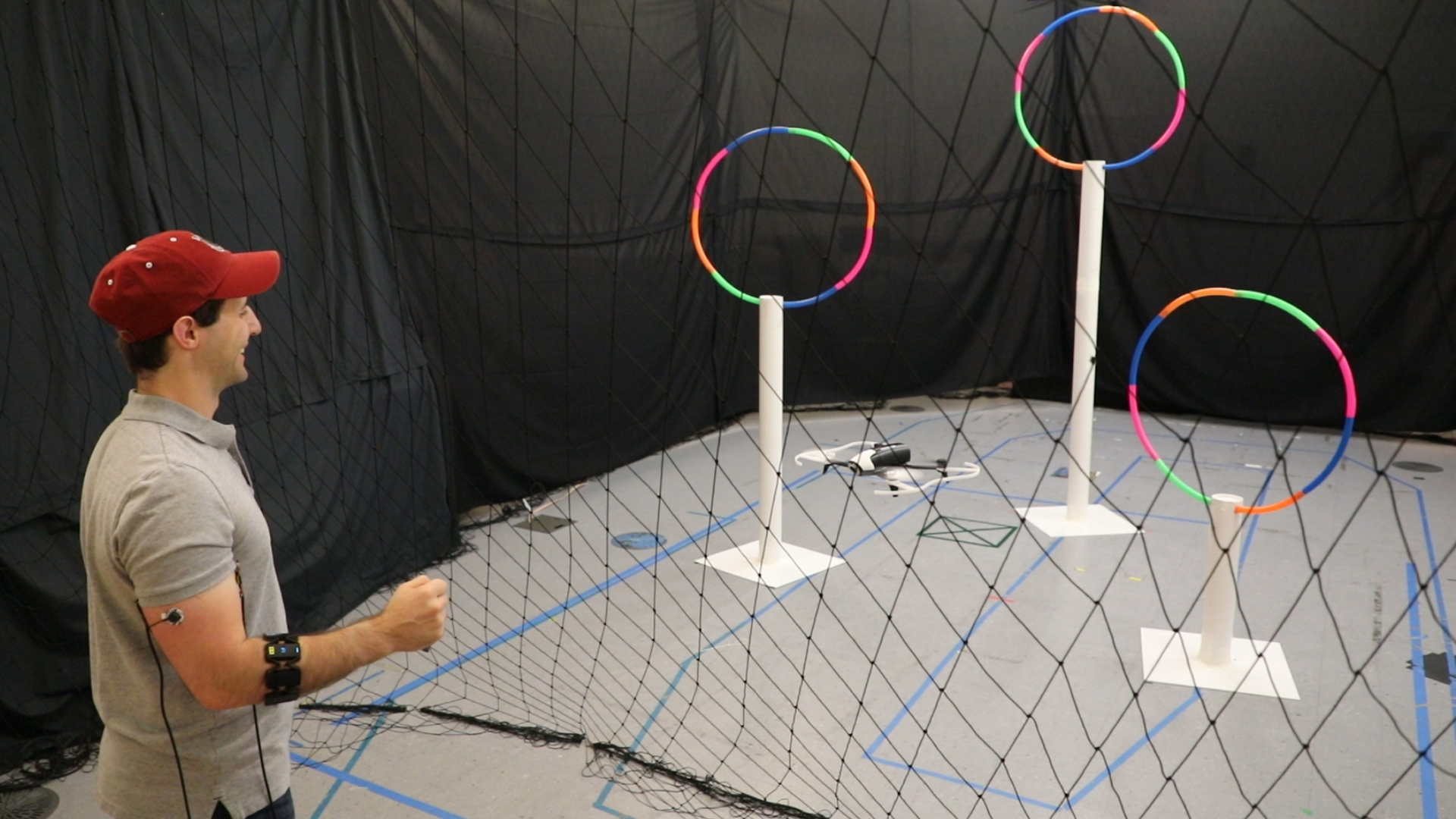
使用手势和可穿戴传感器驾驶无人机通过圆环
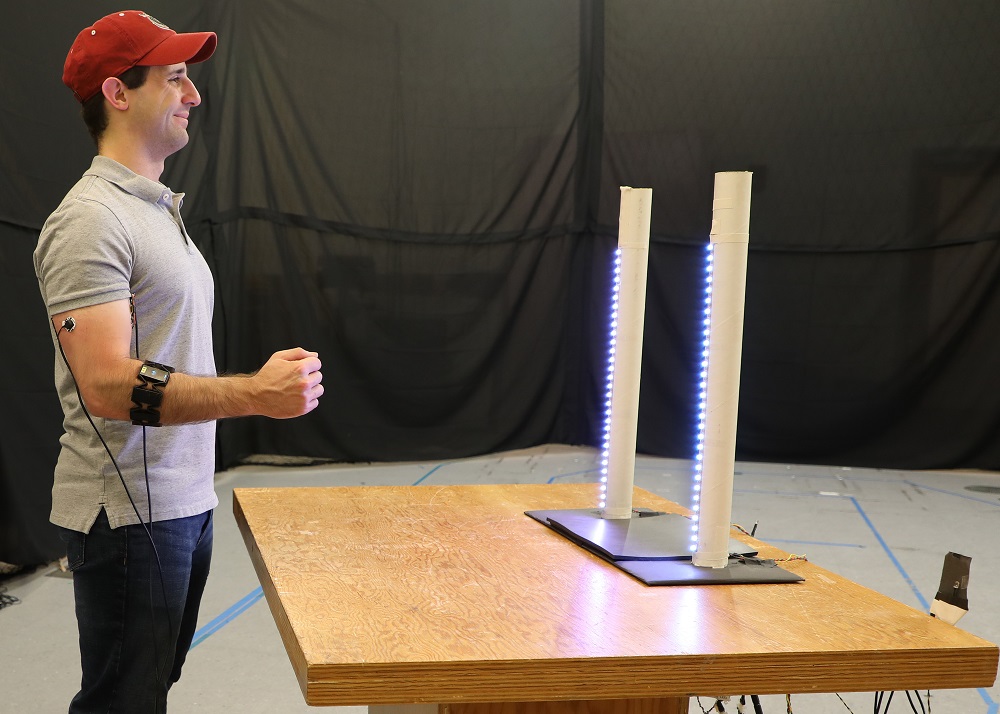
实验包括用led提示手势的会话
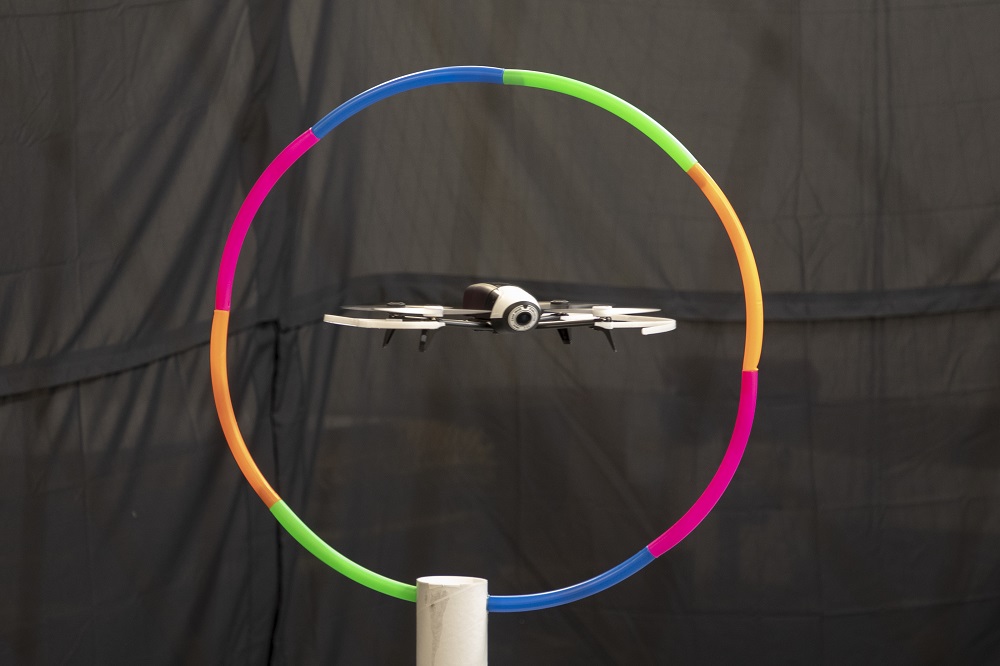
目前的实验使用的是鹦鹉Bebop 2无人机
青瞳视觉编译,其目的是为了将更好的内容分享给更多人,版权依旧归原作者所有。若有涉及侵权请予以告知,我们会尽快在24小时内删除相关内容,谢谢。
-
 美国陪审团称迪士尼欠60万美元的动作捕捉版权审判
美国陪审团称迪士尼欠60万美元的动作捕捉版权审判里尔登指责迪士尼在《美女与野兽》中滥用技术。诉讼称,迪士尼使用了“被盗”版本的面部捕捉软件美国加州一个联邦陪审团周四裁定,迪士尼应为其在2017年翻拍真人版《美女与野兽》时使用了另一家公司的动作捕捉技术,
2023-12-25 行业新闻 -
 《杀出重围》主角亚当·詹森的签名配音演员也想做动作捕捉
《杀出重围》主角亚当·詹森的签名配音演员也想做动作捕捉By Ted Litchfield 在《人类革命》中。伊莱亚斯·图菲西斯完成了《人类分裂》的全部表演。不要让网上的软件告诉你不同的说法:5英尺11英寸和6英尺1英寸之间的差距并没有那么大。然而,演员Elias Toufexis最近
2023-11-14 行业新闻 -
 《博德之门3》导演解释为什么每个NPC都是Mo-Capped
《博德之门3》导演解释为什么每个NPC都是Mo-Capped8月25日,动作捕捉导演阿利奥娜·巴拉诺瓦在推特上解释说,如果没有近数百名演员勤奋的动作捕捉表演,拉里安工作室的《龙与地下城》角色扮演游戏《博德之门3》就不会有今天。“对于我们录制的几乎所有对话,我们
2023-10-23 行业新闻