




 2022-05-20
2022-05-20
 点击量:
点击量:
By Rachel England


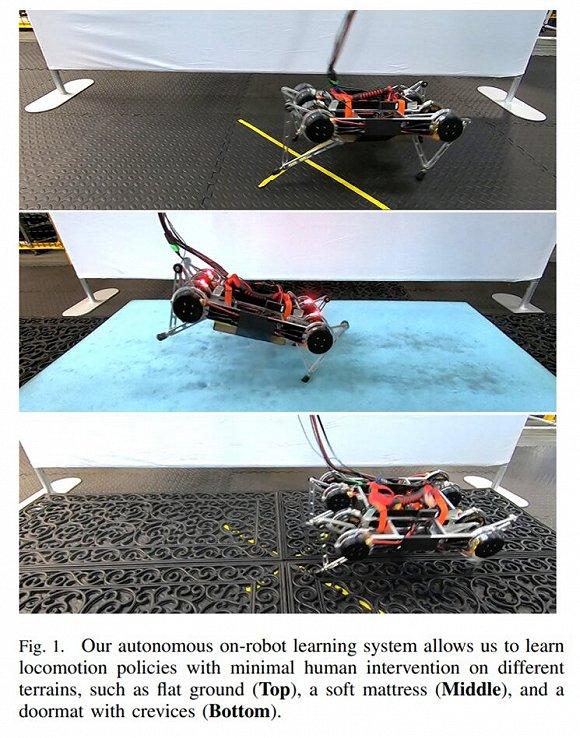
通过成功地调整现有的算法,谷歌Robotics的研究人员能够让一个四条腿的机器人学会如何在几个小时内独自向前、向后和转弯。首先,他们废除了环境建模。通常,在机器人有机会学习走路之前,会在虚拟环境中的虚拟机器人中测试算法。虽然这有助于防止损坏实际的机器人,但模拟砂砾或柔软的表面是非常耗时和复杂的。
因此,研究人员从一开始就在现实世界中进行训练,因为现实世界提供了自然环境的变化,机器人可以更快地适应各种变化,比如台阶和不平坦的地形。然而,人工干预仍然是必要的,研究人员不得不在机器人的训练过程中数百次操纵它。于是他们着手解决这个问题,通过限制机器人的活动范围,让它同时学习多种动作来解决这个问题。如果机器人在向前走的时候走到了它的领地边缘,它就会认识到自己的位置并开始向后走,从而在减轻人类干预的同时学习一项新技能。
有了这个系统,机器人可以通过反复试验,最终学会如何在多个不同的表面自主导航,最终不再需要人类的参与——这是让机器人变得更有用的一个重要里程碑。然而,这项研究也有其局限性。当前的设置使用了一个架空的动作捕捉系统,允许机器人识别自己的位置——这是任何现实世界的机器人应用程序都无法复制的。尽管如此,研究人员希望将新算法应用于不同类型的机器人,甚至是在同一学习环境下的多个机器人,从而创造出一个知识和理解的体系,这将有助于所有领域的机器人技术的发展。
青瞳视觉编译(如版权问题,请及时联系青瞳进行删除,给您带来的不便请谅解)
-
 美国陪审团称迪士尼欠60万美元的动作捕捉版权审判
美国陪审团称迪士尼欠60万美元的动作捕捉版权审判里尔登指责迪士尼在《美女与野兽》中滥用技术。诉讼称,迪士尼使用了“被盗”版本的面部捕捉软件美国加州一个联邦陪审团周四裁定,迪士尼应为其在2017年翻拍真人版《美女与野兽》时使用了另一家公司的动作捕捉技术,
2023-12-25 行业新闻 -
 《杀出重围》主角亚当·詹森的签名配音演员也想做动作捕捉
《杀出重围》主角亚当·詹森的签名配音演员也想做动作捕捉By Ted Litchfield 在《人类革命》中。伊莱亚斯·图菲西斯完成了《人类分裂》的全部表演。不要让网上的软件告诉你不同的说法:5英尺11英寸和6英尺1英寸之间的差距并没有那么大。然而,演员Elias Toufexis最近
2023-11-14 行业新闻 -
 《博德之门3》导演解释为什么每个NPC都是Mo-Capped
《博德之门3》导演解释为什么每个NPC都是Mo-Capped8月25日,动作捕捉导演阿利奥娜·巴拉诺瓦在推特上解释说,如果没有近数百名演员勤奋的动作捕捉表演,拉里安工作室的《龙与地下城》角色扮演游戏《博德之门3》就不会有今天。“对于我们录制的几乎所有对话,我们
2023-10-23 行业新闻